Informática de borde
DESAFÍO: Usar el procesamiento de imágenes basado en la nube puede aumentar la latencia y el tráfico de red. También puede presentar riesgos para la privacidad y la seguridad.
Solución:
Procesar datos de imagen en su lugar de origen en información procesable mediante la informática en la nube. FLIR puede ayudar con las cámaras que ofrecen lo siguiente:
• Captura de imágenes confiable y detallada en condiciones difíciles
• Compatibilidad con IEEE1588 para facilitar la sincronización de la cámara
• Soporte completo de SDK para plataformas ARM y x64
Computación periférica en sistemas integrados con cámaras FLIR
Una introducción rápida a la computación periférica
La computación periférica es un modelo de red donde el procesamiento de datos ocurre en la periferia de la red, cerca del origen de los datos. La informática de borde puede eliminar la necesidad de enviar datos de imagen a un servidor central o servicio en la nube para su procesamiento. Por ejemplo, la informática de borde que se usa para el cobro de peajes permitiría que el sistema realice un reconocimiento de matrículas en un ordenador de baja potencia y de placa reducida, que se encuentre cerca de la cámara. Se transmitirían únicamente las matrículas, pero no las imágenes completas de los vehículos o la carretera. Hoy en día, esto es posible gracias los asequibles y poderosos ordenadores de placa reducida. El SDK Spinnaker de FLIR es compatible con el hardware de x64 y ARM, así como con muchas bibliotecas externas de visualización, por lo que no debe preocuparse por la compatibilidad. Los medios de soporte de plataforma cruzada facilitan el desarrollo de aplicaciones en un entorno de escritorio conocido, para luego desplegarlas en los sistemas integrados.
Beneficios clave de la informática de borde
Procesar datos de imagen en el borde reduce la latencia y la fluctuación del sistema al disminuir el número de interruptores y servidores entre la fuente de datos y el destino. Cada paquete de datos que transita a través de los nodos de la red aumenta la demora entre la adquisición de imágenes y la acción. La informática de borde reduce aun más la latencia del sistema al eliminar la demora ocasionada por el tiempo que demora la carga del dato de imagen. Para mejorar la seguridad del sistema y mitigar las preocupaciones de seguridad, los nodos de borde pueden anonimizar los datos que se envían a la nube para un mayor análisis.
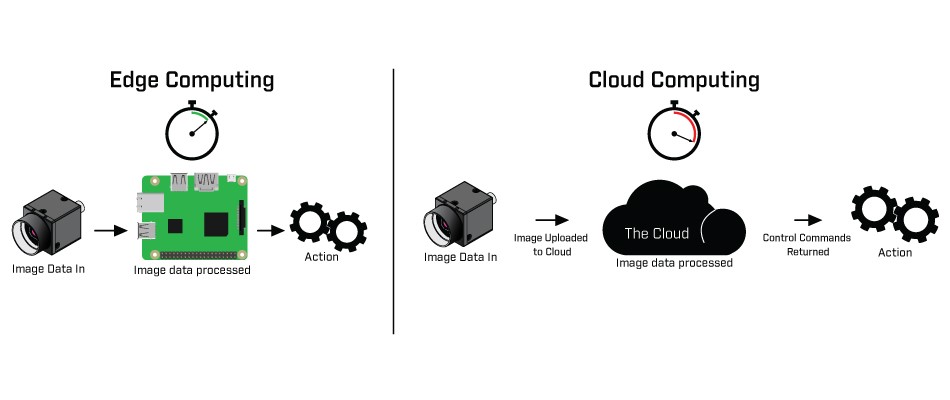
Figura 1: La computación periférica procesa datos de imágenes cerca de la fuente para una baja latencia del sistema
Figura 2: La computación periférica da como resultado una ruta de señal larga para los datos de imagen, que aumenta la latencia del sistema
| Reduce el ancho de banda | Procesar los datos en la fuente elimina la necesidad de transmitir las imágenes de regreso a un servidor central. Como solo se envía la información procesable, se requiere un ancho de banda mucho menor. |
| Reducir la latencia | Reducir la cantidad de datos que se envían lejos del borde acelera el sistema y minimiza las demoras entre las imágenes que se capturan y la información que se recibe. |
| Mejorar la privacidad y la seguridad | La información de carácter sensible como las matrículas y los rostros no se transmite a la nube. |
Cuándo usar la informática de borde
El uso de redes informáticas de borde descentralizadas para controlar el volumen cada vez mayor de los datos generados por la Internet de las cosas a veces se denomina computación en la niebla. En el modelo de computación en la niebla, la computación en la nube no se elimina, sino que cambia su función en el sistema. Los nodos de borde se usan la comunicación de máquina a máquina de baja latencia, mientras que la nube se usa para los análisis de datos más complejos, como los que cubren una zona geográfica amplia o una escala de tiempo mayor.
A la hora de diseñar un sistema de informática de borde, decidir qué datos pasar a la nube para analizarlos en detalle o para almacenarlos a largo plazo es clave. La información requerida en las escalas de tiempo de hasta algunos segundos debe procesarse y modificarse en el borde, mientras que el análisis de los datos de escalas de tiempo más largas puede realizarse en la nube, sin sanción de latencia para el sistema.
| Aplicación | Ventaja |
| Sistemas de tránsito inteligentes | Menor consumo de ancho de banda, mayor seguridad del sistema y riesgos de privacidad mínimos |
| Automatización industrial | Menor latencia y fluctuación para un mayor rendimiento |
| Dirección de vehículos autónomos | Minimiza la latencia del sistema para permitir una toma rápida de decisiones en vehículos de gran velocidad y, a su vez, eliminar la dependencia en una conexión de datos constante. |
La cámara FLIR de visión artificial es compatible con la informática de borde
Las cámaras FLIR optimizan el desarrollo de aplicaciones de visualización para el borde. Al combinar lo sensores CMOS más recientes con algoritmos de autocontrol de avanzada para corregir el color y la exposición, las cámaras FLIR capturan de manera fidedigna imágenes detalladas en condiciones de iluminación difíciles. Las cámaras Blackfly S de FLIR cuentan con sensores Sony Pregius. La elevada eficiencia cuántica y el bajo ruido de lectura permiten que los sensores capturen imágenes claras de bajo ruido digital con poca luz. El amplio rango dinámico garantiza la captura de detalles en regiones con sombra y bien iluminadas de escenas de alto contraste.

Las cámaras FLIR incluyen un poderoso procesamiento de imágenes a bordo con interpolación del color, afilado de imagen y corrección gamma, lo que reduce los requisitos de procesamiento del servidor. La compatibilidad con el protocolo de tiempo de precisión IEEE 1588 facilita la sincronización de GigE Backfly S de base de tiempo común con otros dispositivos que admitan IEEE 1588.
Compatibilidad con SDK de Spinnaker
Al ser compatibles con los sistemas x64 y ARM, las cámaras FLIR accionadas con el SDK de Spinnaker pueden desplegarse en una gran variedad de dispositivos comerciales. La compatibilidad de plataforma cruzada proporciona una experiencia de usuario consistente tanto en Windows x64 como en Linux.
| ARM64 | X64 | |
| Windows 7/8/10 | No | Sí |
| Ubuntu 14.01/16.04 | Sí | Sí |
| LinuxGUI | No | Sí |
Más recursos útiles
Si desea comparar el rendimiento de imagen de nuestras cámaras según la norma EMVA 1288, visite la herramienta de comparación de sensores en línea y la página del selector de cámaras.
Para ver las definiciones de los términos relativos al rendimiento de imagen según la norma EMVA 1288, como eficiencia cuántica y rango dinámico, visite el resumen de la EMVA 1288.